船舶力学杂志已发表格式范文参考
1.基于神经网络的船舶辐射噪声预报方法
作者:黄欣 ;徐荣武;李瑞彪
作者单位:海军工程大学;船舶振动噪声重点实验室
关键词:辐射噪声预报;BP神经网络;梯度下降算法;贝叶斯正则化算法
摘要:针对船舶机械设备众多、结构复杂、振动传递路径相互耦合的现状,本文提出基于误差反向传播 (Back Propagation,BP)神经网络的船舶水下辐射噪声预报方法。分别构建基于梯度下降算法和贝叶斯正则化算法的 BP神经网络,以振动数据为输入量、船体辐射噪声为输出量,将均方根误差 (eRMSE) 和平均绝对误差 (eMAE) 作为 模型预测精度评价指标。结果表明,贝叶斯正则化 BP 神经网络的泛化性和鲁棒性优于梯度下降算法的 BP 神经 网络,误差达到 3dB 以内,在船舶辐射噪声预报领域具有较好的适用性。
0 引 言
船舶水下辐射噪声预报是进一步采取减振降噪措施、建造低辐射噪声和低目标强度隐身船舶的基础。船舶结构复杂,内部机械设备众多,是一个具有多个耦合声通道的极复杂噪声源,其水下辐射噪声 还会受到流激噪声、螺旋桨噪声的影响 [1]。复杂的噪声传递路径和众多的辐射噪声源为船舶的辐射噪 声预报带来了巨大挑战。
目前国内外研究大多集中于船舶设计建造的初期阶段,采取有限元、边界元、统计能量分析等数值 解析方法对船舶结构噪声进行预测 [2−5] ,以满足设计性能要求。但是对于船舶这类大型复杂结构,上述 方法往往因为计算模型复杂、计算量巨大而在工程实际中应用较少。二十世纪下半叶,传递路径分析 (TransferPathAnalysis,TPA)方法 [6] 逐渐发展,由最初描述线性电网络逐步应用于机械系统的结构振动 传递,并进一步发展提出了工况传递路径分析方法(OperationalTransferPathAnalysis,OTPA) [7]。 OTPA 基于不同工况建立响应点与目标点之间的线性传递函数关系,在船舶辐射噪声实时预报领域得 到了较为广泛的应用 [8−9]。但深入研究后发现,不同时刻和不同工况下,系统输入和输出之间并非严格 的线性关系,此时基于所有工况作为输入求解传递函数不再具有适用性 [10]。随着人工神经网络 (ArtificialNeuralNetwork,ANN)的深入发展,该技术在工程各领域得到了广泛应用。目前已有国内外 研究者利用 ANN 进行船舶辐射噪声源分类识别 [11−14] 以及船舶舱室噪声、自噪声、螺旋桨噪声等船舶 噪声的预报 [15−19] ,并且利用相关算法对船舶水下噪声信号进行了粗略的建模仿真 [20−22] ,但是针对船舶整 体辐射噪声预测的研究较少。
鉴于上述船舶辐射噪声预报方法存在的局限性,本文提出采用 BP 神经网络进行船舶辐射噪声的 预报与评估,分别采用梯度下降算法与贝叶斯正则化算法训练网络,并从平均绝对误差、均方根误差以 及 拟合优度三个角度对预测结果进行分析评估。
1 BP 神经网络的工作原理和算法
作为 ANN 中最常用的神经网络,BP 神经网络利用误差反向传播的思想,解决了多层神经网络隐 含层连接权重的学习问题。BP 神经网络通过改变节点数、节点之间连接权重、偏置等参数来调整网络 性能,以达到对研究对象之间某种关系或函数的逼近,可以拟合任意非线性关系 [23] ,对于解决响应点与 目 标点之间传递关系的非线性问题、提高辐射噪声预测精度具有理论可行性。
1.1 BP 神经网络基本原理
BP 神经网络为多层前馈网络,输入层和输出层之间包含若干层神经元,构成隐含层。隐含层可以 为一层或多层,隐含层层数越多,模型结构就越复杂,虽然更贴近样本数据之间的映射关系,但同时会 面临模型过拟合的问题,导致泛化性能降低,BP 神经网络输入层和输出层仅有一层。
BP 神经网络的基本算法包括信号的正向传递和误差的反向传播,在正向传递过程中,输入信号从 输入层经隐含层逐层处理后传递至输出层。若输出结果不满足误差精度要求,则转入反向传播。网络 将沿着损失函数减小最快的方向,从输出层经 过各隐含层逐层向前调整网络的权值和偏置。 经过不断的学习修正,最终使 BP神经网络输出 达到预设的误差精度。
假定 BP 输入层有 n 个神经元,隐含层为单 层共 q 个神经元,输出层有 m 个神经元,则网络 的拓扑结构如图 1 所示。
基于图 1 的拓扑结构,BP 神经网络的训练 步骤为:
①步骤 1——信息的正向传递 {(X1 ,Y1),(X2

现给定训练集 ,Y2),···,(XN,YN)},Xi ∈ R n Yi ∈ R m , ,N 为样本数量,每个输入样本特征维数为 n,标签维度为 m。图 1 中输入层为第 l 个样 本数据 x (l) i,则隐含层和输出层各神经元的输入 aj、br 分别为

式中,hj 为第 j 个隐层神经元的输出,可表示成

式中, ηj f 为隐含层的激活函数, 为隐含层偏置。 为将非线性变化引入 BP 神经网络,f 一般选取 为非线性激活函数,图 2 为常用非线性激活函 数图像对比。
为防止预测结果出现负值,一般选用 Sigmoid 函数,表达式如下:

对于训练样本 ,假定神经网络的输 出为

式中, 为输出层激活函数, 为输出层偏置,则该网络在训练样本 上的均方误差为

②步骤 2——误差的反向传播 一轮训练结束,若损失函数没有达到预设误差精度,神经网络会采取基于梯度下降的训练策略对 网络参数进行更新迭代,即开启误差的反向传播过程,该部分将在 2.2 节中详细介绍。
③步骤 3——根据误差值和目标精度进行多次迭代,不断调整神经网络的连接权重和偏置,直至满 足 误差要求为止。
1.2 梯度下降算法
本文将均方误差(MeanSquaredError,MSE)作为网络的损失函数,具体如下:

式中, 为第 l 个样本的实测值, 表示网络根据输入值 计算出的样本预测值,w 和 b 分 别为网络的权重和偏置。采用梯度下降算法(GradientDescent,GD)来计算损失函数 沿梯度下 降最快方向的最小值,动态调整各网络层之前的权重 w 以及实测值与预测值距离的偏差 b。

梯度下降过程中,会不断重复式(8),当损失函数收敛不变时,则训练停止。学习率 λ 决定了下降 的速率,当学习率较大时,函数下降速度快,但是容易陷入局部振荡;学习率较小时,函数收敛较慢,但精 度高。
偏置 b 的梯度下降算法与 w 一致,这里不再赘述。需要注意的是,梯度下降算法是在每一个样本 数据都输入网络并且计算得到所有样本的总误差后,再进行权值和偏置的修正,采用该种批处理的方式 ,网络收敛速度明显快于分别处理方式。
1.3 贝叶斯正则化算法
一个良好的模型需要在训练集上满足误差精度,同时要求具有较好的泛化性,即对于未知的输入 样本数据,同样具有较好的预测性能。在实际应用中,模型结构并非越复杂越好,过度追求在训练集上 的误差精度,会导致数据过拟合,对于训练集以外的数据,产生与目标值差别较大的输出。
正则化通过修改损失函数防止模型过拟合,而贝叶斯正则化(BayesianRegularization)则从贝叶斯 的角度引入权重 w 的先验概率密度分布,对损失函数加以先验约束,在式(7)的基础上,得到贝叶斯正 则化之后的目标函数如下:

式中,α、β 分别为目标函数参数,ϕ(w) 为正则项。
在贝叶斯框架中,网络权重被认为是随机变量。在网络获取数据后,网络权重的后验概率密度函 数如式(10)所示 [24] :

式中,D 代表数据集,M 为特定神经网络模型, 为给定权重 w 情况下数据集 D 出现的概率, 为权重的先验概率, 为正则化过程的归一化因子。
若假设权重 w 的先验概率密度符合高斯分布,则有下式:

为求得网络的最优权重,应当使后验概率 最大化,相当于正则化目标函数 的最小化,进一步根据贝叶斯准则优化目标函数参数 α 和 β,不断迭代计算直至网 络 收敛。
2 基于 BP 神经网络的船舶水下辐射噪声预报
2.1 数据样本
船舶上机械设备的振动能量通过基座、管路等途径传递到艇体,再以声波的形式从艇体向水中辐 射。为验证本文提出的基于 BP 神经网络的船舶辐射噪声预报方法的可行性,结合实际船舶结构及振 动 传递路径,设计并开展以下舱段模型试验来建立样本数据库。
2.1.1试验设置
选择杭州千岛湖作为舱段模型试验场地,舱段吊放深度恒定 25m,内部安装四台激振器。J1和 J3 两台激振器布置在左舷,J2和 J4两台激振器布置在右舷,其发射频率及功率均可调整。舱段模型周围 共布置三类传感器,I 型传感器为舱段内部布置的干端加速度传感器,编号为 S1~S28(共 28 个),分别用 于测量激振器机脚、基座及内侧舱壁振动信号;II 型传感器为舱段外壳体上布置的湿端加速度传感器, 编号为 S32~S46(共 15 个),沿舱段轴向均匀分布,用来测量艇外指定部位的振动信号;III 型传感器为布置在舱段模型两侧正横方向处的 2 个水听器,距舱段外壳距离分别为 7m和 13m,用来采集舱外指 定部位的声压信号。传感器具体布置示意图如 图 3 所示。

2.1.2数据库的获取
以实船不同转速下机械设备振动信号作为 激振器激励源,通过增加隔振装置来改变激振 器安装状态,设计若干激振器组合开启工况,模 拟船舶实际水下航行时舱内的机械设备振动情 况,每组数据包括加速度传感器以及水听器的 时域信号,信号采样频率为 8192Hz,每组工况 采集时间约 100s。
按照球面波的衰减规律,将舱段外部两个 水听器所测声压值转化为距离舱段模型等效中 心 1m 处的声压级,并取两者平均值作为辐射噪声。实际我们往往关注辐射噪声在各频段的能量,因此 对 传感器时域信号进行预处理,用各传感器数据的 1/3 倍频程频带级来构建数据库。
2.1.3构建样本数据集
本文将内侧舱壁布置的干端加速度传感器振动数据作为自变量,舱段辐射噪声数据作为因变量, 由此建立从振动信号到辐射噪声的函数映射关系。为贴近实际船舶辐射噪声预报时可用工况数量较少 的现实条件,选择少量样本进行训练,保证 BP 神经网络的方法不仅满足舱段模型的辐射噪声预测效 果,而且在实船辐射噪声评估领域同样具有适用性。因此,从数据库中选择 20 组典型工况,涵盖不同转 速以及不同设备组合开启状态,具体工况信息如表 1 所示。在构建样本数据时,将 20 组典型工况按照 训练集和测试集进行划分,其中训练集占比 90%,用于训练 BP 神经网络,基于训练得到的网络模型来 评估剩下 10% 的测试工况下的辐射噪声。将每组典型工况下的 100s 采样数据均分成 10 段,一段 10s, 分别对 10s 一段的时域数据进行处理得到该工况下的 10 组样本数据,每组包含作为自变量的加速度 传感器 1/3 倍频程数据和作为因变量的水听器 1/3 倍频程数据。基于以上处理,构建的样本数据中,训 练样本数量为 180 个,测试样本数量为 20 个,后者又分为二个工况,即测试工况 1#和 2#,分别对应 10 个样本,每个工况取 10 个样本的预测结果均值作为该工况的最终评估结果。需要说明的是,训练集 和测试集的选择为随机划分,用于评估的 1#工况和 2#工况并无直接关系,且并未参与神经网络的训练, 仅作为测试样本来评估模型的准确性以及泛化性。

在训练网络前,需要对训练样本进行归一化处理,使数据尽量落入激活函数的非线性区域内,避免 神经元出现饱和。式(14)为本文采用的归一化算法:

式中,xmax、xmin、ymax、ymin 分别为归一化前后的最大值与最小值。需要注意的是,在进行测试样本预测 时,应利用相同的归一化结构体对输入量进行归一化预处理,而后再输入模型,以保证预测结果的可 靠 性。
2.2 BP 神经网络的建立 BP 神经网络输入层的神经元个数,对应着每个样本输入数据维度。这里将监测舱壁振动的干端 加速度传感器振动数据作为训练样本输入,辐射噪声 1/3 倍频程频带级作为输出,因此设置输入层神经 元个数为 18,输出层神经元个数为 1。
根据前人经验,隐含层神经元个数可参照下列公式设计 [25] :

式中,n 为隐含层神经元个数,ni 为输入层神经元个数,no 为输出层神经元个数,a 为 1~10 之间的常 数。本文 a 取值为 2,则由上式隐层节点数为 6。BP 神经网络训练函数分别选用自适应学习率梯度下 降算法(traingda)和贝叶斯正则化算法(trainbr),前者命名为模型一,后者命名为模型二。模型二在模型 一基础上加入贝叶斯正则化算法进行优化,其他参数保持一致。神经网络具体设置如表 2 所示。

2.3 神经网络的训练及预测结果
按照表 1 参数设置 BP 神经网络模型,利用训练好的模型对#1 工况与#2 工况的辐射噪声进行预 测。使用均方根误差 eRMSE 和平均绝对误差 eMAE 作为模型预测精度的主要指标,拟合优度 R 2 衡量预 测值与实际数据之间的拟合程度,以上三个指标分别如式(16)、式(17)和式(18)所示。eRMSE 和 eMAE 越小表示预测精度越高,R 2 越大则预测效果越好。

将每个频带的 1/3 倍频程实测值记为 , 为 的平均值,预测值记为 ,i = 1,2,··· , M,考察频段为 10Hz~2kHz,M 为 1/3 倍频程频段数量。得到两种测试工况下的辐射噪声预测结果与实测值的对比分 析如图 4(模型一)、图 5(模型二)所示,辐射噪声预测绝对误差如图 6 所示,预测结果的评价指标如 表 3 所示。
结合图 4~6 不难看出,BP 神经网络对船舶的辐射噪声预报结果与实测值拟合较好,模型一与模型 二在 200Hz~2kHz 频段内误差整体低于 10~160Hz 频段。针对大多数频段,模型一与模型二对 2#工 况的预测效果优于 1#工况。 由图 6(a)可知,模型一 80% 的频段绝对误差在 5dB 以内,16Hz 频段误差较大为 11dB。
由图 6(b) 可知,模型二在 1#工况 50Hz 和 160Hz 频段以及 2#工况 10Hz 频段误差在 6~9dB 之间,其余频段误 差均在 4dB 以内。表 3 表明两种不同考核工况的 eRMSE 和 eMAE 都小于 5dB,R 2 均大于 0.5。对于两 种考核工况,模型二的预测误差评价指标均能达到 3dB 以内,对 1#工况的预测精度相较模型一有明显提升。以上结论表明,采用贝叶斯正则化算法优化后的 BP 神经网络预测精度明显高于以梯度下降算 法 为基础的 BP 神经网络,具有更好的泛化性能。


3 背景噪声对预报结果影响分析
由于实际海洋环境不确定因素较多,任何人为或环境带来的噪声都有可能对辐射噪声预报结果产 生较大影响。因此在开始舱段试验前,针对每一种工况开展背景噪声测试。将试验舱段吊放至 25m 指 定深度,激振器处于关闭状态,测量各传感器信号并记录。
由于 1#工况的预测效果不及 2#工况,因此本章重点考察 1#工况。图 7 为 1#工况下的辐射噪声及 背景噪声的 1/3 倍频程频带级,图 8 为 1#工况各频段的信噪比。由图 7、图 8 可知,1#工况低频大部分 频段辐射噪声信号不满足信噪比大于 6dB 的试验要求。

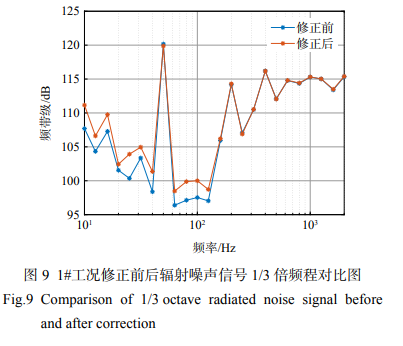
基于上述背景噪声测量结果,对传感器信号进行背景噪声修正,将修正后的样本数据输入 2.3 节训 练好的神经网络模型中,比较修正前后模型预 测性能。图 9 为1#工况修正前后的辐射噪声信 号 1/3 倍频程对比图,图 10 为辐射噪声预测绝 对误差对比图,表 4 为修正前后预测结果评价 指标对比。
由图 9 可以直观看出,在低频段背景噪声 对辐射噪声影响较大,经修正后低频段辐射噪 声信号更加纯净,使得 1/3 倍频程频带级有所增 加。结合图 10 不难看出,信号修正前后模型一 和模型二在 10~160Hz 频段的预测性能相较于 200Hz~2kHz 频段有明显提升,表明实测信号 若不满足试验信噪比要求会影响网络的预测效 果。同时我们注意到,1#工况在 50Hz 频段处信噪比高达 20dB,满足试验要求,但根据图 10 中标红部分可以看出,该频段的预测误差并不比其他频段 低,因此并非信噪比越高预测误差就越小;且修正后两个模型在该频段的预测精度也有一定程度的提 升,表明信噪比只是影响预测精度的因素之一,即使在信噪比满足试验要求的前提下,神经网络模型对 样本数据的拟合能力不同,也会对预测结果产生影响。

由图 10 及表 4 可知,采用背景噪声修正后的传感器信号训练模型一和模型二,在 1#工况条件下, 模型一 16Hz 频段预测误差下降 11dB 左右,整体来看 和 指标都有较大幅度的降低,说明模型 一的预测性能提升明显。模型二 50Hz 频段误差下降最大,为 3.5dB,但表 4 中各项评价指标提升并不明显,这从侧面表明进行贝叶斯正则化算法优化的模型具有更好的鲁棒性,即使在周围环境扰动情况下 也有较好的预测精度。

图 11 为修正前后的模型一在 16Hz 频带的神经网络训练结果,修正前 16Hz 频带的神经网络训练 陷入局部振荡,其最优误差不再下降,为防止继续训练出现过拟合现象,在还未达到目标误差情况下提 前 终止训练,而经过修正后的模型一其训练结果能达到误差精度要求,因此模型的预测性能得到提升。
4 结 论
本文以舱段模型的壳体振动为输入量,以辐射噪声为输出量,构建和训练 BP 神经网络,并对辐射 噪声进行预测,得到以下主要结论:
(1)BP 神经网络在预测船舶辐射噪声领域效果较好,测试样本中大部分频带预测误差小于 5dB;
(2)相较基础的梯度下降算法,贝叶斯正则化算法能够提高 BP 神经网络的预测性能,各项考核性 能指标均能达到 3dB 以内,具有更好的泛化性和鲁棒性,但模型的训练响应时间有所增加。
(3)样本质量对神经网络模型预测结果有一定程度影响,在对样本数据进行背景噪声修正后,模型 预测精度得到提升。
以上结论表明,利用 BP 神经网络方法进行船舶辐射噪声预测具有可行性,这为工程中在航船舶的 辐射噪声预报提供了新思路。
