弹箭与制导学报杂志已发表格式范文参考
1.复合微下击暴流风场下小型无人机的飞行分析
作者:王文博;李海城; 吴超;车晓涛;杜明磊
作者单位:西安现代控制技术研究所
关键词:Dryden模型;微下击暴流; 无人机;巡航段
摘 要: 为研究复合微下击暴流风场对轻小型固定翼无人机巡航段的影响,文中构建了 Dryden 大气紊流模型与微下 击暴流风场模型,融合后得到复合微下击暴流风场,并以电动无人机为例,进行了六自由度刚体弹道模型仿真分析。 仿真结果表明,所建立的复合风场具有较好的随机特性与典型的风切变特征,能够有效描述实际复合微下击暴流风场 的分布及变化;在风场影响下,该电动无人机高度损失明显,在中心诱导速度为 10 ~ 25 m/ s 时,损失高度达 168 ~ 537 m;此外,无人机的航时、攻角、侧滑角以及动力余量等飞行参数亦发生了不同程度的变化。
0 引言
在现代战场环境中,无人机因其高机动性、多样 化作战能力、低造价成本,以及在快速反应和精确打 击中的卓越表现,已成为打击时敏及高价值目标的重 要作战平台。 然而,作为一种小型低速飞行器,无人 机的作战效能在复杂气象条件下,尤其是在极端天气 中,受到显著限制。 据研究,气象条件对传统弹药的 射击精度有显著影响,其中气流变化是关键因素[1] 。 相比之下,无人机因其飞行时间长、速度低、气动特性 敏感,更易受到风切变和大气紊流的干扰,导致姿态 失稳、任务失败以及精确打击能力下降。
目前,关于弹箭风场的建模大多采用简化的平均 风模型和随机扰动风模型,但这些模型在处理复杂作 战环境中的典型风场现象时存在一定的局限性。 微 下击暴流作为一种局地性极强的极端天气现象,是一 种典型的风切变现象,常发生在我国西南一带与东南 沿海[2]等战略敏感地区,往往伴随着剧烈的垂直风切 变,能够在短时间内产生强烈的下沉气流,严重威胁 低空飞行器的稳定性和操控能力。 这种难以预测的 气象现象对无人机的飞行性能提出了严峻挑战,尤其 是在复杂动态的战场态势中,传统的气象探测难以完全应对突发情况。 因此,无人机在恶劣气象条件下保 持可靠的飞行与打击性能,不仅是应对这些恶劣天气 的关键,也是提高作战效果,实现出其不意战术优势 的必要条件。
现有研究主要集中在大型航空器的气动性能分 析和飞行稳定性影响方面,通过风洞实验与数值模拟 探讨微下击暴流对商用客机和军用运输机的影响,并 提出相应的应对策略。 只有少部分在对诸如巡航导 弹、制导火箭弹、火炮等传统弹药的研究,陈建伟等先 后建立了低空风切变风场[3] ,以尾翼火箭弹为对象进 行弹道仿真,得到无控火箭弹在特定风场下的扰动规 律[4] ;王晋以涡环模型建立了微下击暴流风场,通过 融合雨滴运动模型[5] 、结合位势流动理论[6]对火炮外 弹道特性进行偏差分析。 然而,无人机在微下击暴流 及其复合形式下的飞行特性研究较少。 此外,无人机 在穿越微下击暴流场时,常遇到不规则突风和湍流扰 动[7] ,这些因素共同作用,形成更为复杂的复合微下 击暴流,使风场结构更加复杂,提高了飞行控制与路 径规划的难度。 因此,研究无人机在复杂风场环境下 的飞行,具有重要的实际意义。 为此,通过建立复合 微下击暴流风场来模拟恶劣气象环境,其中包括典型 的微下击暴流和大气紊流特征。 相比于传统的随机 扰动模型,该复合风场更具真实的三维流场特性与时 间连续相关性,更真实反映了复杂作战场景中的气象 条件。
文中以电动无人机的巡航段为例,对其在复合微 下击暴流风场下的航迹、航时、能量消耗、攻角及侧滑 角进行仿真分析,旨在为恶劣环境下无人机的总体设 计和飞行控制优化提供新的思路与参考。
1 复合微下击暴流风场模型的建立
选取基于流体力学原理的涡环模型来构建微下 击暴流风场,引入倾斜变化与涡环对叠加,实现实际 风场中的三维特性与非对称性;基于随机平稳过程理 论,建立 Dryden 模型,通过随机双交换法与相关性检 验,实现大气紊流场的建立。 通过无人机的时空特性 将两者融合得到复合微下击暴流风场模型。
1. 1 多倾斜涡环对风切变模型
在空间范围内,微下击暴流通常表现为如下的流 动形式:高度 300 ~ 1 000 m 范围内,高压气旋(云层) 中部形成一股向下的气流,气流撞击地面后,呈辐射 状水平散开,并在外围形成尾流旋涡[8] 。 强对流天 气、锋面天气、低空急流及下击暴流均会产生风切变,图 1为形成示意图。

多倾斜涡环对风切变模型是通过设置对称涡环对 模拟单对涡环形成的下击暴流;再考虑由地形等引起 的非对称性,使用坐标转移矩阵进行倾斜放置;最后结 合实际应用场景的影响,适当对涡环位置进行调整。
1. 1. 1 对称涡环模型
建立涡环地面坐标系 Oxyz,x,y,z 依次指向北、 东、天方向为正,以地面上方一点 OP为中心设置主涡 环,其半径为 R,涡环设置示意如图 2。

该模型经解算后,对称涡环流线方程可表示为:

式中: Г 为涡环强度;Fp (k),FI(k)为点 Op ,OI 处的椭 圆积分函数,k 为涡环线方程的椭圆积分自变量。 Γ, F(k),k 可表示为:

式中:vz(0)为涡环中心向下的诱导速度;R 为涡环半 径;rmax,rmin为机体位置到涡环线最大与最小距离。
最终可以得到某点处无人机的 x,y,z 三向风速 u,v,w:

式中 rO 为机体位置到涡环中心线的距离。 现对特殊位置的风速进行说明。
1)涡环中轴线处,即 rO = 0 时:由流线方程计算 出的诱导速度趋近正无穷,不合理,因此该处速度由 涡环位函数偏导计算,径向速度为 0,轴向速度为[9] :

2)涡环线上,即 r0 = r 时:由式(3) 可知,当距离 为 0 时,诱导速度会解算至正无穷,不符合实际情况。 故构造半径为 r 的封闭环形圆柱,引入诱导因子 ξ , 建立连续变化的涡核模型,其表达式为[10] :

修正后的风速为:

1. 1. 2 多倾斜涡环对模型
实际情况下,微下击暴流风场往往由多个风暴中 心(涡环)组成的,且水平辐射的外流也是非对称的, 因此引入倾斜变换矩阵,通过多涡环叠加来模拟区域 范围内的微下击暴流风场。 如图3 所示,令主涡环坐标系与地面坐标系的夹角 向量为 (φ,θ,0) T ,对应的旋转矩阵为 M(φ) , M(θ) , 则镜像涡环与地面系夹角向量为 ( - φ, - θ,0) T 。 通过矩阵变换 M(φ) , M(θ) 完成主涡环坐标系到地面 坐标系的转换,同理可由矩阵变换 M( - φ) , M( - θ) 实 现镜像涡环坐标系到地面坐标系的转换。 其中:


由 (x,y,z,R,v0 ,r,φ,θ) 来确定唯一涡环模型, 参照文献[11]和文献[12]的飞行仿真实验数据进行 多涡环模型参数设置,各涡环模型参数见表 1。

图 4 ~ 图 8 为各涡环模型在 y = 1500 m 处剖面的 平面风矢量分布图,模型 A 为对称涡环对,将模型 A 倾 斜放置后得到模型 B,另外增设尺度较小的对称涡环对 模型 C 与倾斜涡环模型 D,融合叠加后得到模型 E。


通过对比图 4 和图 5 实测风场数据的比较可以 看出,对称涡环所构建的下击暴流风场有较高的对称 性,与实际风场数据较为相似,但实际风场中仍存在 部分非对称风速。
通过图 6 看出,涡环中心轴附近区域的风速垂直 分量较大,且在水平方向,距离涡环中心轴越远风速 越小,涡环外存在风速上卷,与实际下击暴流风场中 近地面处风速变化几乎一致。

通过图 6 和 8 看出,在融合多涡环后,与单涡环 对模型相比,垂直面内风矢量出现多处切变现象,且 具有良好的三维特性,能够较为真实地反映微下击暴 流的实际风速分布情况,模型空间特征合理,满足弹 道仿真的要求。

1. 2 Dryden 大气紊流场模型
大气紊流是指大气中存在的不规则、混乱的气流 运动,其形成与诸多因素有关,如风切变、热交换、地 形诱导等,其基本特征是速度场沿空间和时间分布的 不规则性,可以将速度场视为由均值与偏离量两部分 组成,一般引入平稳性、正态性、冻结假设和各向同性 假设,用随机过程的理论与方法进行描述[8] 。
Dryden 模型与 Von Karman 模型是已被公认两种 适用于飞行仿真的紊流模型,对于小型无人机而言, 两种模型差别不大[13] ,但 Dryden 模型频谱形式简单, 有利于仿真计算,且小型无人机的姿态受风速梯度影 响较小,故选取一维 Dryden 模型进行紊流场建模,通 过时域法构建大气紊流场。
时域法构建大气紊流场是利用高斯白噪声,通过 成形滤波器(大气紊流场模型通过空域、频域、时域变 换即可得到)来实现,因此高斯白噪声、成形滤波器的 质量决定了大气紊流场的质量[14] 。
1. 2. 1 白噪声优化
白化程度是衡量高斯白噪声优劣的重要指标,通 过随机双交换法来改变高斯白噪声信号的内部顺序, 降低信号间的相关程度,具体算法步骤如下[15] :
1)随机选取一个白噪声序列 xi(n),其中,i = 0, 1,2,…;n = 0,1,2,…,N - 1。当 i = 0 时,表示初始的 自噪声序列。
2)将序列中任意两个点的数据 xi(m) , xi(l) 交 换位置,得到新的噪声序列 xi+1 (n) 。 3)计算新序列 xi+1 (n) 的自相关函数 ri+1 。

4)计算自相关系数平方和 Si + 1 。

设 S0 为原始序列 x0 (n) 的自相关系数平方和,以判断 在步骤 6)中 S1 与 S0 进行对比后循环次数是否 + 1 ; 5)当序列的自相关系数平方和小于设定的误差 阈值,即 Si+1 < θ 或循环次数 i 达到最大循环次数 Nmax 时,则停止交换,输出经过 xi+1 (n) ; 6)若 Si+1 < Si ,则i = i +1 ,返回2);反之,返回1), 重新执行上述步骤。
随机双交换方法仅改变了信号的内部分布,以减 少相关性。 功率谱密度(PSD)的均匀性是衡量噪声白 化程度的一个重要指标[14] 。 PSD 分布越均匀,则噪声 的随机性越强,质量越好。 采用文献[16]的方法来生 成白噪声,以一组长度为 1 000 的白噪声为例,设定阈 值为 10,最大循环次数为 10 000,计算随机双交换前后 白噪声序列的功率谱密度,结果如图 9 所示。

通过图9 与图10 可看出,优化后白噪声序列的 PSD 分布更加均匀,自相关系数平方和随交换次数降低。
1. 2. 2 成形滤波器
根据 Dryden 模型,由时间频谱函数得到三向速 度及对应的相关函数:
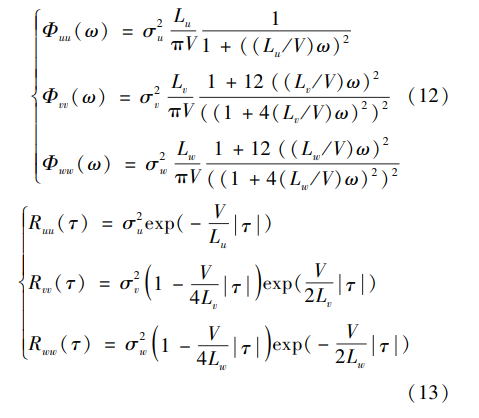
式中: σu ,σv,σw 为三向紊流强度,根据飞行高度与经 验[14] , σu = σv = σw ,取 1. 2 m / s;对于各同向性紊 流, Lu ,2Lv,2Lw 为三向紊流尺度, Lu = 2Lv = 2Lw ,取 200 m [14] ; V 为无人机速度,取 60 m / s。 最终设计成 形滤波器进行输出,具体如下。
在控制过程中,成形滤波器能够将白噪声转化成 有色噪声。 白噪声的频谱为常值,令它为单位值,单 位强度的白噪声 r(t) 通过一个传递函数为 G(s) 的 滤波器,产生随机过程 u(t) ,则 u(t) 的频谱函数为:
Φ(ω) = G ∗ (iω)G(iω) = G(iω) 2 (14) 式中 G ∗表示 G 的复共轭。 将紊流的各项时间频谱函 数按上式进行分解,得到产生给定频谱所需的成形滤 波器的传递函数 G(s) :

为方便实现,将 Gv , Gw 简化为一阶环节,各环节 的输入是均值为 0,方差为 1 的近似 Gauss 分布的白 噪声,故还须对滤波器进行离散化。
引入修正系数 kP和 kQ可得[17] :

式中:xi为离散序列 x 第 i 点的值;h 为采样周期。
经过仿真计算,得到三向紊流速度、风速相关性 对比如图 11、图 12 所示。

通过图 12 可知,仿真结果与理论值比较接近, 具有较高吻合度,针对文中研究的固定翼无人机, 可在一定 程 度 上 反 映 出 其 在 大 气 环 境 中 的 扰 动 特性。
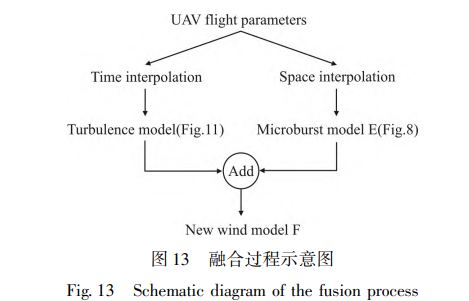
1. 3 风场融合
考虑风场主要特征与风矢量的变化性,将紊流 场融入至微下击暴流场模型 E 中,得到复合下击暴 流风场 模 型,记 为 模 型 F,具 体 融 合 过 程 如 图 13 所示。
假设无人机从复合下击暴流风场竖向对称面中 穿过,不受风场影响,保持高度在 1 050 m,可得到 图 14 中实线部分风速,可以看出,模型 F 规避了部分 风速线性化,且可较好描述多因素耦合复杂情况下的 大气流动。

2 计及风场的平飞段弹道模型
在风场作用下,一般是将风的作用引入至飞行器 速度的变化中,以地速为标准,将风的影响归结为附 加攻角、侧滑角的变化。 无人机空间六自由度运动方 程采用苏式坐标系建立,具体参考文献[18⁃19]。 当 风矢量发生变化时,无人机空速的变化可视为存在偏 差的标准空速,弹道倾角、弹道偏角随之变化,引起攻 角、侧滑角与速度倾斜角的变化,进一步影响空气动 力与力矩,为实现定高巡航,控制系统做出相应调整 以抵消风矢量的影响。
巡航段平飞状态下由于气动状态相对稳定,工程 设计中一般使用 PID 控制器对其进行控制,设计高 度、俯仰、姿态控制回路,保证巡航段稳定的飞行高 度;设计滚转姿态及侧向位置控制回路,保证航线平 面稳定跟踪;设计空速闭环控制回路,调整电机输出, 实现空速的稳定跟踪。
3 弹道仿真分析
3. 1 仿真条件 以电动无人机为对象进行仿真计算,其发射初始 条件如表 2 所示,仿真状态视为依次经过抛撒或分 离、降高转平后理想的飞行状态。

3. 2 不同风场强度下的弹道仿真
将无风状态下记为状态 1。 由风切变定义知,风 速大小是风切变强度的决定因素,通过对比 JAWS 的 多普勒雷达测量统计结果和美军飞行数据记录器FDR 提取的微下击暴流风切变数据比较[20] ,确定复 合微下击暴流模型的中心诱导风速分别为 10 m / s, 15 m / s,20 m / s,25 m / s,依次记为状态 2 ~ 状态 5。
以平飞时间 200 s 为仿真截止条件,模拟无人机 穿越复合微下击暴流风场飞行,各飞行状态采用同一 的控制策略与参数,以状态 1 仿真结果为基准进行对 照分析。 表 3 为各状态下飞行参数的仿真结果,k 为 能量消耗相对变化率,d 为掉高高度。
由表 3 和图 15、图 16 可以看出,无风状态下,无 人机经过短暂爬升后,可以按照预设航线进行平飞, 受到复合微下击暴流场的影响,无人机巡航段弹道特 征发生较大变化:1)巡航高度随着中心诱导速度的增 大出现掉高现象,尤其是在状态 5 中掉高达到 537 m, 若同等风场条件下,掉高高度大于飞行高度,则极易 造成坠毁风险,相较于侧向位置偏差,这类风险在各 类试验测试中是最重要的;2)受北向风影响,状态 2 消耗能量最低,状态 3 ~ 状态 5 由于存在掉高需要爬 升故北向距离相对减小、消耗相对增大,在非严苛的 环境下动力余量尚足以保证飞行任务,也可通过调整 航线对风场加以利用,进而减小能量消耗;3)侧向位 置与复合风场中心诱导速度的大小呈正相关,由于无 人机是从风场竖向对称面中穿越飞行,初始受到的横 向风较小,滚转通道快速稳定后再受到较为连续的横 向风后,控制系统可以对风速变化带来的影响进行及 时控制,但模型建立精细度不足,状态 5 在 40 s 左右 的跳变在实际飞行中很难执行,横向操纵性较低的无 人机极易发散失控。
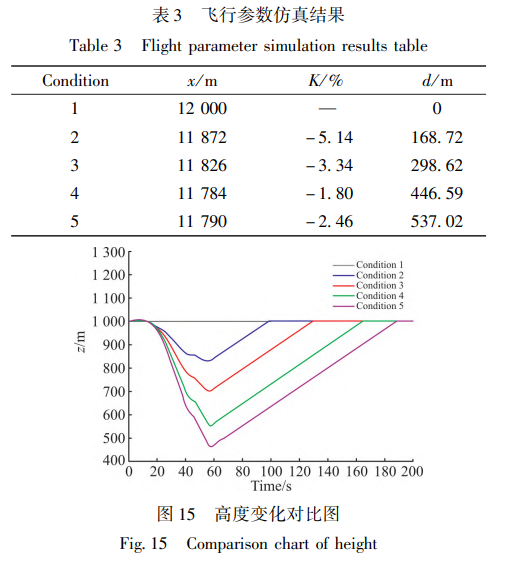

图 17 ~ 图 19 依次为地面坐标系下北、天、东三向 风速在飞行时间 60 s 内的变化。 可以看出各向风速 变化较为连续,随着诱导速度增大,风速并非成比例 变化,受紊流叠加的影响,风速变化更具随机性;受复 合微下击暴流场的三维性影响,状态 4、状态 5 在 35 s 左右开始天向、东向速度基本接近。

通过图 20、图 21 可以看出,紊流对攻角、侧滑角 影响明显,出现多处波动,可以说明小型无人机气动 特性敏感,状态 2 ~ 状态 4 下攻角、侧滑角持续保持在 一个相对稳定的范围内;受到了 3 个微下击暴流涡环 中心垂直气流的影响,攻角出现了多个峰值;无人机 在飞出子涡环区域后会出现攻角突增、侧滑角振幅增 大,故抗微下击暴流的姿态控制能力应置于边缘风场 区域进行考量;受到控制系统影响,状态 2 ~ 状态 4 间 攻角、侧滑角变化较为相似,但随诱导速度增大状态 5 下攻角、侧滑角波动显著增大,基本处于控制边界。

4 结论
由建立优化后的紊流场与下击暴流场,将两者融 合后得到复合微下击暴流场,通过仿真计算,得到以 下结论:
1)所建立的复合风场具有较高的真实性与三 维特性,可弥补无人机设计工程中对风场描述的不 足,并应用于性能分析、设计优化、事故复现等;
2)复 合微下击暴流场的中心诱导速度对飞行高度有较大 影响,无人机在穿越强度高的下击暴流场或遭受地形 引起的风切变时,极易造成掉高坠毁事故。 文中尚未研究空中布撒无人机在抛撒段以及自 杀式无人机在末制导段受复合微下击暴流场的影响。 受限于控制系统性能与各子系统的设计余量,各类无 人机在微下击暴流场下的飞行性能需要独立分析,下一步研究将着重于基于现有设计,通过改进控制算法 提高无人机的抗风能力。
