工程设计学报杂志已发表格式范文参考
1.基于Kresling折纸结构的气动爬壁机器人设计与性能分析
作者:楚凯;张宇;王家梁;周 浩;舒 申;胡俊峰
作者单位:江西理工大学
关键词:软体爬壁机器人;软连续体结构;Kresling折纸结构;适应性;双向爬行
摘 要:以柔性材料为主体的软体爬壁机器人可通过被动变形或主动变形来改变自身形状,以适应复杂的壁面环 境。但由于柔性材料的低刚度和滞后性,现有软体爬壁机器人普遍存在驱动力不足及运动稳定性差的问题,严重制 约了其实际应用。针对该问题,基于Kresling折纸结构设计了一种可灵活爬行的气动爬壁机器人。该机器人由锚定 模块和伸缩模块组成,锚定模块利用吸盘在负压状态下的吸附作用来实现在壁面上的锚定,伸缩模块采用以 Kresling折纸结构和塑料薄膜封皮为主体的软连续体结构,可实现伸展和收缩。通过实验测得,所设计的机器人可 在坡度为0°~90°的光滑壁面上实现速度为25~28 mm/s的稳定爬行,且对不同材质的壁面均具有良好的适应性。结 果表明,基于Kresling折纸结构的气动爬壁机器人不仅能够在不同坡度、不同材质的壁面上双向爬行,还能基于伸 缩模块的柔顺性在壁面上灵活转弯,这可为软体爬壁机器人的设计和优化提供新思路。
近年来,爬壁机器人技术发展迅速,并在清 洁、检查、维护和监测领域得到了广泛应用[1-3] 。然 而,现有爬壁机器人大部分为刚性结构[4-7] ,在崎岖 地形中行动受限,稳定性差,且控制复杂[8] 。软体 机器人的出现为爬壁机器人的设计提供了新的可能 性。与传统的刚性机器人相比,由柔性材料制成的 软体机器人具有自由度多、适应性强、灵活性好以 及人机交互安全等优势。此外,软体机器人结构简 单,能够降低制造成本和控制难度[9] 。
软体爬壁机器人的爬壁性能主要取决于驱动器 和附着方式。气动执行器因结构简单、变形显著及 轻便易操作而被广泛应用[10] ,如形状记忆合金 (shape memory alloys, SMA)[11] 、介电弹性体 (di‐ electric elastomer, DE)[12] 、人工肌肉执行器等。对 于需要较强吸附力的软体爬壁机器人而言,吸盘抽 负压吸附是一个很好的选择[13] 。此外,电黏附 (electro adhesion, EA) 技术具有简单的结构和良好 的表面适应性[14] ,常被应用于小型化和轻量化的爬 壁机器人[15] 。
除了驱动器与附着方式外,控制方法对软体爬 壁机器人的爬壁性能也有显著影响。其中,高频电 压控制被广泛应用于采用小变形驱动器的软体机器 人 (如DE驱动机器人[16 )] ,通过快速切换驱动器的 变形和机器人足部的附着状态来实现尺蠖式爬行运 动。然而,这种控制方法只适用于简单、重复的运 动。对于气动软体机器人,可通过气泵和气阀控制 气动执行器的压力来实现大变形,从而使机器人完 成可调节的尺蠖式爬行运动[17] 。
除了平面运动外,软体机器人在实现拉取重物 方面也面临着重大挑战。拉取重物的能力可以扩展 软体机器人的综合工作能力,使其能够满足在壁面 上工作的需求。Fu等[18] 设计了具有 2个吸盘和 2段 弹簧增强驱动器的软体机器人,其可克服自身重力 并从水平地面过渡到竖直壁面。受尺蠖多模式运动 能力的启发,Zhang等[19] 开发了一种带有3根气动人 工肌肉的软体爬壁机器人,该机器人通过人工肌肉 将前足从地面举起至竖直墙壁,从而实现由地面爬 行到壁面攀爬的过渡。Yu等[20] 开发了一种可在曲面 上 (如管道或杆表面) 运动的软体爬行机器人,扩 大了软体机器人的工作空间。
综上,现有软体爬壁机器人具有各种功能,如 转弯、攀爬等,但将这些功能集成到单个机器人中 仍具有一定的挑战性。解决这一问题的难点主要在 于兼顾攀爬稳定性和结构简化。相较于单一运动功 能,多种运动功能需要更多的驱动器和更显著的变 形来实现,这增加了软体爬壁机器人从壁面上脱落 的风险。因此,需要设计轻量化的结构和稳定的吸 附方式来应对各种壁面环境以及多次运动所产生的 剥离力。此外,不同的运动功能也需要设计不同的 动作来实现。例如:转弯运动需要一个可改变前后 锚定模块角度的动作来实现。
为此,本文基于Kresling折纸结构设计了一种 仅由伸缩模块和锚定模块组成的结构简单的轻量级 气动爬壁机器人。该机器人可执行多种运动功能, 如双向爬行、竖直爬壁、灵活主动转弯以及攀爬不 同坡度的倾斜壁面等。首先,对机器人的结构设计 进行详细介绍,并分析其直线爬行运动和转弯运动 的原理;然后,对伸缩模块的结构进行设计,并测 试伸缩模块的性能及其对机器人爬行性能的影响; 最后,对机器人的直线爬行、转弯、负重性能进行 实验测试,以验证其结构设计的可行性。
1 基于Kresling折纸结构的气动爬壁机器人 设计
1.1 机器人整体结构设计
尺蠖等蠕虫采用先前脚锚定、后脚松开,身体 收缩,再后脚固定、前脚松开,身体伸展的循环运 动方式,这种交替的步态使得尺蠖能够连续地向前 移动。受蠕虫爬行运动的启发,设计仿尺蠖软体爬 壁机器人。基于该运动原理设计的机器人可在壁面 上稳定爬行。 本文所设计的基于Kresling折纸结构的气动爬壁机器人的结构如图1所示,其总长为202 mm,宽 为105 mm。该机器人由伸缩模块和锚定模块组成, 在爬壁过程中,伸缩模块主要起伸缩和支撑作用, 锚定模块主要起锚定作用。根据机器人的运动原理, 伸缩模块主体采用Kresling折纸结构[21] ,并用塑料薄 膜封闭折纸结构,采用负压驱动方式。Kresling折纸 结构有固定的压缩方向,可实现伸缩模块的稳定收 缩;当停止负压驱动时,由于Kresling折纸结构的 回弹力,使得伸缩模块伸展。锚定模块选用直径为 40 mm的双层吸盘,与伸缩模块通过螺栓连接。

机器人的直线爬行运动原理如图2所示 (以向 上爬行为例),其通过锚定模块和伸缩模块的相互配 合来实现稳定的周期性爬行。一个运动周期分为5 个步态,初始状态下,机器人伸缩模块处于完全伸 展状态,两端锚定模块同时锚定。步态1:头部锚 定模块保持锚定,尾部锚定模块解除锚定。步态2: 伸缩模块开始变形收缩并拉动尾部向上运动。步 态3:伸缩模块完成收缩运动后,尾部锚定模块进 行锚定。步态4:尾部锚定模块完成锚定,头部锚 定模块解除锚定,伸缩模块开始变形伸展。步态5: 伸缩模块完成伸展运动后,头部锚定模块再次进行 锚定,尾部锚定模块解除锚定,进入步态1,形成 循环。不断循环上述步态即可实现机器人在壁面上 的连续向上直线爬行。

1.2 机器人转弯原理分析 本文所设计的机器人采用双腔并排的方式,能 够在竖直壁面上灵活转弯,其转弯原理为:基于伸 缩模块可利用Kresling折纸结构的柔顺性实现360° 弯曲且弯曲后可自行恢复原状的结构特点,控制一 个伸缩模块收缩,另一个伸缩模块弯曲,使得机器 人向伸缩量小的一侧偏移,实现转弯动作。
受蜥蜴扭动爬行运动的启发[22] ,机器人通过扭 动身体带动足部的方式来实现稳定的周期性转弯爬 行,其转弯运动原理如图3所示。一个转弯周期分 为4个阶段。

该机器人的转弯运动包含3个步态。步态1:头 部的2个锚定模块保持锚定状态,左伸缩模块收缩, 右伸缩模块因Kresling折纸结构的柔顺性而产生轻 微的弯曲,使得左伸缩模块顺利收缩。步态2:左 伸缩模块完成收缩后,尾部的2个锚定模块进行锚 定,头部的2个锚定模块解除锚定。步态3:左伸缩 模块开始伸展,在其伸展过程中,右伸缩模块从轻 微的弯曲状态恢复为原状,在左伸缩模块完成伸展 后,头部的2个锚定模块进行锚定。在这一过程中, 左、右伸缩模块均会向上爬行,但因2个伸缩模块 的伸缩量不同,且左伸缩模块的伸缩量大,机器人 整体向右转弯。循环上述步态,机器人可实现持续 的向右转弯爬行。同理,右伸缩模块收缩,左伸缩 模块随之弯曲,即可实现向左转弯。
1.3 伸缩模块设计及性能分析
为了满足爬壁机器人的爬壁要求,设计了一种 以Kresling折纸结构为骨架、塑料薄膜为封闭腔表 皮的伸缩模块。虽Kresling折纸结构与管状折纸结 构均具有回弹力,但前者具有一定的侧向刚度且不 易弯曲,而后者只有固定的弯曲方向且易弯曲,故 Kresling折纸结构可满足爬壁机器人爬行时的刚度 要求。伸缩模块的结构及运动过程如图4所示。塑 料薄膜包裹Kresling折纸结构,两端用3D打印的塑 料筒和塑料外壳固定,塑料外壳上留有 4 mm气管 孔,用于连接机器人与气泵。Kresling折纸结构的 折痕如图 5(a)所示,其由厚度为 0.2 mm 的聚丙烯 (polypropylene, PP) 塑料板折成,折痕由激光机切 割,其中边缘切断,折痕切出虚线;折纸结构为偶 数层,两端留有 2 mm的螺栓孔。相比于由植物纤 维制成的折纸结构,采用塑料材质的折纸结构回弹 力大,使用寿命长,质量小,可作为伸缩模块的储能装置。6层Kresling折纸结构压缩前后的对比如图 5(b)所示,其压缩比高达5.3倍。机器人在单个运动 周期内的爬行距离由伸缩模块的伸长量决定,折纸 结构压缩比大有助于提高机器人的爬行速度。塑料 薄膜采用聚乙烯 (polyethylene, PE) 材质,厚度为 0.02 mm,宽度为 90 mm,采用筒状结构,便于装 配。塑料外壳及塑料套圈的材料为聚丙交酯 (poly‐ lactic acid, PLA),其外径分别为54、44 mm;塑料 筒的外径为44 mm,内径为41 mm。

爬壁机器人向上爬行时要克服自身重力和锚定 模块与壁面之间的摩擦力。为了测量伸缩模块在不 同负压下所能产生的拉伸力,搭建了测力实验平台, 如图6(a)所示:将单腔伸缩模块(含6层Kresling折 纸结构) 固定在铝材架上,伸缩模块上端中心设有 挂钩;将数显推拉力计固定在步进电机直线滑轨上, 其最大可提供200 N的推力或拉力。将伸缩模块的 驱动气压分别设定为-80、-50、-20 kPa,使其处于 收缩状态,直线滑轨带动推拉力计拉动伸缩模块, 推拉力计实时显示每一时刻下的拉伸力,测量数据 如图6(b)所示。结果显示,伸缩模块所产生的最大 拉伸力为65 N。本文所设计的爬壁机器人的质量为 250.07 g,当头部锚定时,其向上爬行所需的拉伸 力 f拉 = f重 + f摩 = 2.45 N + 3 N = 5.45 N (摩擦力为机器 人竖直爬壁时吸盘与壁面接触产生,与壁面材质有 关,此处为估算值)。由此可知,伸缩模块的拉伸力 达到6 N就足以使机器人在向上爬行时克服自身重 力以及其与壁面间的摩擦力,即能保证机器人在竖 直壁面上平稳爬行。结果表明,所设计的伸缩模块 的拉伸力远大于机器人向上爬行时所需克服的自身 重力和摩擦力,满足竖直爬壁要求。

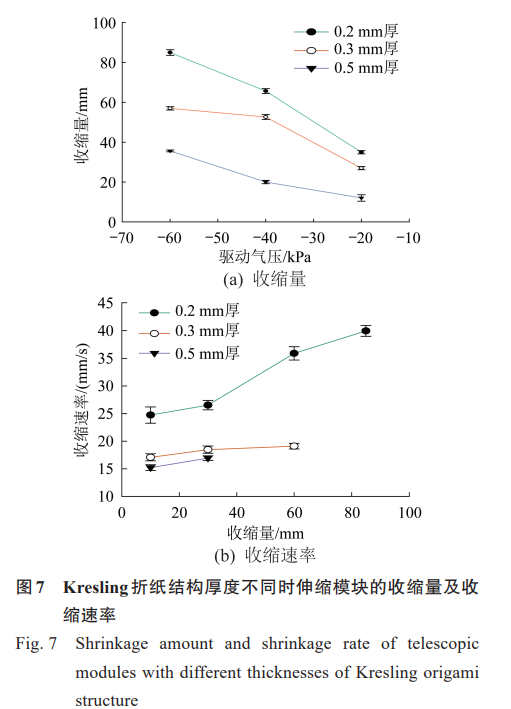
为了提高爬壁机器人的爬行速度,需确定合适 的Kresling折纸结构厚度。爬行速度与伸缩模块的 伸缩量和伸缩速率有关,而伸缩模块的伸缩量和伸 缩速率均与折纸结构厚度直接相关,厚度越大,折 纸结构弹性越大,则抽负压时收缩速率越小,甚至 不收缩。伸缩模块在折纸结构弹力作用下伸展,并 在伸展过程中向外部排出气体,由于环境密封,排 出气体时间影响伸展速率,不同厚度折纸结构的伸 展速率相差不大。因此,提升爬行速度主要取决于 收缩速率和收缩量。在驱动气压分别为-80、-40、 -20 kPa时,测得不同Kresling折纸结构厚度 (0.2、 0.3、0.5 mm)下伸缩模块的收缩量及收缩速率,如 图7所示。结果表明,折纸结构厚度为0.2 mm时伸 缩模块在-20 kPa的驱动气压下能够完全被压缩,其 最大收缩量为 85 mm,最大收缩速率为 40 mm/s。 由此可知,选用0.2 mm厚的Kresling折纸结构能够 有效提升爬壁机器人的爬行速度。
爬壁机器人的爬行稳定性不仅与伸缩模块的 收缩速率有关,还与伸缩模块所能承受的径向力 与回弹力有关。Kresling 折纸结构采用柔性材料, 但机器人爬壁时身体须保持伸直状态,这样锚定模块才能锚定在壁面上,从而实现竖直向上的稳 定爬行。
因此,伸缩模块要保持一定的刚度,这 对 Kresling折纸结构的层数有一定的要求。图 8展 示了 Kresling 折纸结构层数不同时 (6 层和 10 层) 伸缩模块的刚度。由图可知,当折纸结构为 10 层 时,伸缩模块的刚度不满足要求,机器人两端均 会产生形变,影响锚定模块的锚定效果,从而无 法实现在竖直壁面上的稳定爬行。

为了实现爬壁机器人在竖直壁面上的稳定爬 行,需确定合适的 Kresling 折纸结构层数。考虑 Kresling折纸结构的特性,偶数层折纸结构收缩时 不会产生扭转,能够使锚定模块在爬行时一直紧贴 壁面。在测力实验平台上对Kresling折纸结构层数 分别为 4、6、10 时的机器人进行侧向力和回弹力 测量,结果如图9所示 (锚定模块、塑料外壳、塑 料筒等的质量约为 150 g,即 1.47 N)。由图 9可看 出,当折纸结构为 6 层时,机器人的回弹力为 16.3 N,侧向力为1.9 N;当折纸结构为4层时,机 器人的回弹力为 15.4 N,侧向力为 2.8 N。由此可 知,Kresling折纸结构为4层和6层时,机器人的回 弹力和侧向力均满足要求。回弹力是保证机器人伸 缩模块伸展的动力,而侧向力用于保证机器人爬行 时的刚度,即保证头部和尾部一直与壁面贴合。折 纸结构层数越多,则伸缩模块的伸缩量越大,机器 人在单个运动周期内的爬行距离越大。然而,由于 伸缩模块变形需要时间,这会限制驱动气压的频率, 在驱动气压频率无法提高的前提下,为提高机器人 的爬行速度,宜选择伸缩量大的折纸结构。因此,6 层的Kresling折纸结构是最佳选择。

1.4 锚定模块选用与分析
锚定模块影响爬壁机器人爬行稳定性的因素主 要有3个:吸盘吸附力、吸附成功率和脱附成功率。 1) 吸盘吸附力:机器人整体质量约为250 g,选用 直径为40 mm的吸盘,其侧向吸附力为20 N,能在 保证机器人结构紧凑的同时满足爬行稳定性的要求。 2) 吸附成功率:选用双层吸盘以提高吸附成功率, 相较于单层吸盘,双层吸盘的底部更为柔软,在爬 行过程中更易吸附成功。3)脱附成功率:双层吸盘 具有弹性,当停止负压驱动时,吸盘可立即脱落, 使得锚定模块快速解除锚定。采用双层吸盘的锚定 模块可为爬壁机器人实现快速稳定爬行提供有利的 锚定条件。
2 气动爬壁机器人的爬行性能分析
2.1 机器人样机与控制系统
本文所设计的爬壁机器人的样机与控制系统如 图10所示。控制系统主要由计算机、Arduino UNO 开发板、通断式电磁阀、继电器、稳压电源和气泵 等组成。利用计算机编写程序并烧录进 Arduino UNO 开发板后,开发板程序运行,PWM (pulsewidth modulation,脉宽调制) 信号传递给继电器, 继电器控制电磁阀通断,从而实现电磁阀对锚定模 块和伸缩模块的控制。在 Arduino程序中,设置高 低电平变换的时间(频率),以控制机器人的爬行速 度,通过编写不同的控制程序来实现机器人在壁面 上的变速爬行、前进、后退、向左转弯和向右转弯 等。其中:Arduino UNO开发板由计算机单独供电; 气泵由稳压电源提供220 V电压;电磁阀由稳压电 源提供 24 V 电压;继电器由开发板提供 5 V 电压。 为方便对结构调整后的机器人进行控制,在铝架控 制平台上留空余位置,以便在机器人结构调整后添 加相应的控制元件。

2.2 竖直爬壁分析
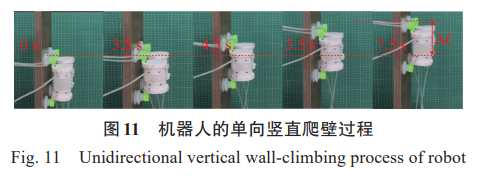
为了验证所设计的爬壁机器人的直线爬行性 能,在竖直木板上开展单向爬行测试 (驱动气压为 -80 kPa,控制平台开关气泵的频率分别为 1 s 和 0.8 s),爬行过程如图11所示。单个爬行循环包括5 种状态:初始状态、头部锚定、身体收缩、尾部锚 定和身体伸展。结果显示:该机器人可在7.5 s内沿 竖直木板向上爬行200 mm,锚定时间仅为0.6 s,伸 缩模块的收缩和伸展时间分别为0.8 s和1.2 s。实验 数据表明,由于双层吸盘的吸附作用,机器人的锚 定模块能够在短时间内锚定在壁面上。通过计算可 得,机器人的平均爬行速度为 26.7 mm/s。由此说 明,采用PP磨砂半透明塑料板折成的Kresling折纸 结构具有质量小、储能高的特点,可实现机器人在 竖直壁面上的快速爬行。竖直爬壁实验结果验证了 机器人结构设计的可行性。
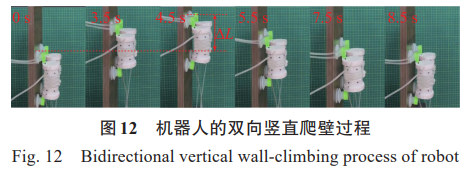
为进一步验证爬壁机器人在竖直壁面上的双向 爬行能力,选用木板开展双向爬行实验 (木板总长 为125 mm,驱动气压条件与单向爬行时一致)。为确 定机器人到达木板顶端所需的步态,先开展预爬行 实验,并根据预爬行实验结果改变控制程序,使得 机器人在爬到木板顶端后向下爬行,爬行过程如图 12所示。结果显示,在双向运动场景下,机器人在 竖直木板上先作爬升运动,用时5.3 s,再向下作回程 运动以回到初始位置,用时 3.2 s,总爬行距离为 250 mm,爬行速度约为30 mm/s。双向爬行实验结果 表明,所设计的爬壁机器人具有双向爬行的能力, 且在自身重力的影响下,向下的爬行速度更快。
2.3 负重爬行分析
为了验证爬壁机器人拉取重物的能力,在不同 坡度的玻璃板上开展负重爬行测试。将50 g砝码连 接在机器人尾部,并在长度为 1 000 mm 的玻璃板 (坡度分别为30°、60°、90°)上进行多次爬行测试, 结果如图13所示(驱动气压条件与2.2节同)。结果 显示:当玻璃板坡度从30°增大到90°时,机器人的 最大爬行速度没有明显下降,说明该机器人在不同 坡度的玻璃板上均能负重爬行。玻璃板坡度为 60° 时机器人的爬行速度较坡度为 30°时的有小幅度提 升。这是因为机器人在有坡度的玻璃板上爬行时会 对玻璃板产生压力作用,而 60°下所产生的压力比 30°下的小,则爬行时机器人所需克服的摩擦力较 小,更容易爬行,且爬行速度较快。负重爬行实验 结果表明,在一定的负压下,所设计的爬壁机器人 在倾斜壁面上具备良好的负重爬行能力。

2.4 转弯爬行分析
为了验证爬壁机器人的转弯性能,在有刻度的 塑料板上开展转弯爬行实验。将机器人右伸缩模块 的驱动气压分别设定为-80、-50、-20 kPa(控制平 台开关气泵的频率分别为1 s和0.8 s),记录机器人 在爬行过程中转180°所需的时间。机器人在驱动气 压为-50 kPa下转180°的过程如图14所示。结果表 明,机器人在爬行过程中转180°历时20个周期(伸 缩模块伸缩一次为1个周期)。机器人在不同驱动气 压下的转弯时间如图 15所示。由图 15可知,相比 于-50、-20 kPa 驱动气压下,-80 kPa 下机器人转 180°所需的时间最短,为19.4 s,转弯速度为9.3 (°)/s。 由此说明,在一定的驱动气压频率下,负压越大, 机器人的转弯速度越快。

2.5 爬行适应性分析
为了评估爬壁机器人在坡度、材质不同的壁面 上的自适应能力,分别在木板、塑料板、玻璃板上 开展爬行测试。准备长 600 mm、宽 400 mm 的木 板、塑料板、玻璃板,将带有尺寸标记的3种壁面 分别固定在可改变角度的支架上以设置相应的坡度; 完成坡度设置后,把机器人放在壁面上并分别将机 器人的驱动气压设定为-9、-24、-35 kPa,使机器 人在坡度为0°、30°、60°、90°的木板、玻璃板、塑 料板上爬行,共开展36组爬行实验,记录相关爬行 数据。不同驱动气压下机器人在不同坡度、不同材 质壁面上的爬行速度如图 16 所示。由图 16 可知, 在相同的驱动气压与壁面坡度下,机器人在玻璃板 上的爬行速度普遍比在其他2种壁面上的快,说明 壁面越光滑,机器人的爬行速度越快;在水平爬壁 状态 (即坡度为0°) 下,机器人在玻璃板上的爬行 速度最快,可达 28 mm/s;在竖直爬壁状态下,机 器人在塑料板上的爬行速度最快,可达 26 mm/s, 这是因为机器人在竖直玻璃板上爬行时出现了打滑 现象,爬行速度变慢。在坡度为 90°的塑料板上, 对机器人施加-9 kPa的驱动气压时,机器人无法完 成爬行,说明壁面越粗糙,机器人爬行所需的驱动 气压越大。根据图16所示的爬行速度,确定最佳的 爬行条件为驱动气压为-35 kPa,该驱动气压下机器 人的爬行演示如图17所示。实验结果表明,所设计 的爬壁机器人在不同壁面环境下均能稳定、快速地 完成爬行,说明其具有良好的壁面环境适应性。
爬壁机器人在不同坡度的壁面上稳定爬升的挑 战在于平衡机器人的重量,即在伸缩模块伸缩的同 时保证锚定模块能够稳定地在壁面上吸附与脱落。 本文所设计的爬壁机器人能够在不同坡度的壁面上 稳定爬行的原因如下:1) 机器人采用塑料材质的 Kresling折纸结构,整体质量较小;2) 伸缩模块可 提供较大的伸缩力来支撑机器人。相比于水平爬行, 爬壁机器人的竖直爬行更具有挑战性,这是因为机 器人竖直爬行时除了要克服自身重力外,还需要锚 定模块在吸附后能提供足够大的摩擦力,故机器人 两端的锚定模块必须有一个处于锚定状态,以避免 机器人坠落。在竖直壁面上爬行时,当机器人头部 的锚定模块处于非锚定状态,尾部的锚定模块处于 锚定状态,伸缩模块处于完全伸展状态时,由于重力作用,伸缩模块的完全伸展长度略小于在水平壁 面上的完全伸展长度,这会导致机器人爬行速度下 降。当壁面坡度大于 90°时,由于机器人自身重力 和6根气管重力等因素的影响,锚定模块无法与壁 面贴合以完成吸附,故机器人在坡度超过 90°的壁 面上无法实现爬行。

2.6 竖直壁面避障爬行
为了验证爬壁机器人的转弯灵活性,开展避障 爬行实验 (驱动气压条件与2.2节同)。在竖直木板 上固定2个障碍物,令机器人从木板底部向上爬行 并避开障碍物。机器人在竖直木板上的避障爬行过 程如图 18 所示,具体如下:1) 机器人先直行 200 mm,从第 1 个障碍物到达第 2 个障碍物附近; 2) 机器人主动向左转弯 80°,以调整位置和方向; 3) 机器人再次主动向右转弯 120°,以调整位置和 方向;4)机器人继续直行350 mm,完成避障运动。 整个避障过程耗时75 s。机器人能够在竖直壁面上 灵活避障的原因在于:Kresling折纸结构的柔顺性 使得机器人能够主动转弯,机器人通过直线爬行和 主动转弯的相互配合,可灵活避开障碍物并爬到目 的地。竖直壁面避障爬行实验结果验证了所设计的 爬壁机器人可通过自适应改变自身形状来实现灵活 转弯。

3 结 论
现有软体爬壁机器人因柔性材料的低刚度和滞 后性,普遍存在驱动力不足及运动稳定性差的问题。 针对这一问题,本文基于Kresling折纸结构设计了 一种可灵活爬行的气动爬壁机器人。该机器人由锚 定模块和伸缩模块组成。通过实验对机器人的双向 爬行、负重爬行、灵活转弯性能以及自适应性进行 了测试。结果表明:该机器人具备良好的柔顺性和 适应性,能够适应不同材质的复杂壁面环境。与现 有刚性爬壁机器人相比,基于Kresling折纸结构的 气动爬壁机器人具有抗冲击的特点,且爬行稳定性 显著提高。此外,所设计的爬壁机器人结构紧凑且 功能多样,其整体尺寸仅为202 mm×105 mm,可在 坡度为0°~90°的不同壁面上稳定地双向爬行、灵活转弯和负重爬行。研究结果可为软体爬壁机器人的 设计和优化提供新思路。
然而,本文所设计的爬壁机器人在壁面上的转 弯爬行是通过机器人的整体柔顺性来实现的。在遇 到需要跨越的壁面环境时,该机器人无法完成灵活 转弯,这说明机器人伸缩模块的柔顺性未得到充分 利用。在未来的研究中,将会对机器人结构进行优 化设计,增加主动跨越障碍和跨越壁面的结构,使 机器人具备在三维空间内爬壁的能力,从而适应更 加复杂的壁面环境。
