激光杂志杂志已发表格式范文参考
1.基于人工智能的高精密光学元件表面疵病识别研究
作者:梅香香;朱阳燕;蔡小丹
作者单位:南通理工学院
关键词:人工智能;高精密;光学元件;表面疵病识别;形态学处理;支持向量机
摘 要:高精密光学元件表面疵病类型繁多,当前高精密光学元件表面疵病识别存在一定的不足,为了准 确识别多类疵病,研究基于人工智能的高精密光学元件表面疵病识别方法。 采集高精密光学元件表面图像,使 用形态学处理方法对图像进行腐蚀、膨胀、开闭运算,滤除图像噪声;提取去噪后光学元件表面中疵病矩形度、 伸长度、圆度、凹凸度作为疵病特征样本,输入支持向量机构建元件表面疵病识别模型,引入鲸鱼优化算法寻优 设定支持向量参数,实验测试结果显示:本方法可以对各种高精密光学元件表面疵病识别,识别正确率超过 95%,同时高精密光学元件表面疵病识别时间控制 8 s 以内,实时性能好。
1 引言
光学元件的表面疵病,如划痕、麻点、气泡等,不 仅影响光学元件的外观,还会降低光学元件的性能, 如光学透过率、成像质量等。 这些疵病在加工过程中 难以完全避免,因此,对其进行有效的检测和控制成 为一个重要研究方向[1] 。 光学元件种类繁多,按材料、口径、外形等有多种 分类,这要求检测技术能够适应不同种类光学元件。
光学元件检测过程繁琐且充满不确定性,需要探索各 种检测技术以满足不同需求[2] 。 目前,光学元件表面 疵病检测问题中,邵延华等使用网络 ICFNet 光学元件表面疵病识别,但在光学元件表面疵病检测中,部 分疵病尺寸和数量可能难以精确量化,尤其是在不同 光照条件和观察角度下[3] 。 马志程等通过改进 Mask R-CNN 网络模型,引入 CSPRepResNet 和 ESE 注意力 机制,以及采用梯度均衡化的 Focal Loss 等,使得对划 痕缺陷的检测精度得到显著提高,但仅适用于特定类 型的缺陷检测,应用范围窄[4] 。 王娜等通过过焦扫描 光学显微镜,可以在不破坏光学元件的情况下,快速 检测出其亚表面缺陷,过焦扫描光学显微镜及其配套 设备成本高,限制该方法应用场景[5] 。 徐顺琴等用图 像传感器获得多幅图像,并通过图像融合算法和识别 算法,高精度检测光学镜片表面疵病。 双光源下的视 觉检测方法对光源的选择和设置有一定的要求,不同 的光源类型和参数设置可能会对检测结果产生影响。 因此,在实际应用中需要根据具体情况进行光源选择 和参数调整[6] 。
为了改善高精密光学元件表面疵病识别效果,提 出基于人工智能的高精密光学元件表面疵病识别方 法,并分析了其性能。
2 高精密光学元件表面疵病识别方法
2. 1 高精密光学元件表面采集装置
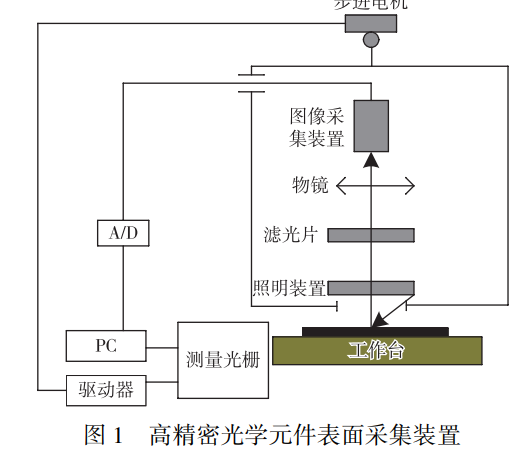
图 1 是高精密光学元件表面采集装置示意图,采 集装置包括照明、图像采集装置。 照明装置是检测表 面疵病的关键,直接影响观测和成像质量[7] 。 为确保 待测表面得到均匀且不过强的照明,选择 LED 环形 光源,并采用柯拉照明模式[8] 。 图像采集装为 CCD 传感器、图像采集卡、用于图像分析的 PC 端。 CCD 传感器于将光信号转换为电信号,当光线照射到 CCD 传感器上时,便会产生电荷,电荷被转换为电压信号, 形成图像数据。 图像采负责将 CCD 传感器捕获的图 像数据转换为 PC 端处理的数字信号[9-10] 。
2. 2 基于形态学处理的元件表面图像去噪方法
采集高精密光学元件表面图像时,光照因素对成 像质量存在一定影响[11] ,进而影响后续元件表面疵 病识别精度。 为此,使用基于形态学处理的元件表面 图像去噪方法,对采集的高精密光学元件表面图进行 预处理。 处理方法主要分为腐蚀、膨胀、开闭运算。 腐蚀属于数学形态学运算的基础方法之一,能够去除 高精密光学元件表面图像边界点,将边界收缩方向控 制为由外向内,以此去除微小干扰物[12-14] 。 设定采 集的高精密光学元件表面图像是 G,G 的连通域以及 结构元素分别设成 Y、R,如果 R 的原点移动至(x,y), 移动后 R 变成 Rxy,R 将 Y 腐蚀后,元件表面图像变成 F:

若 R 完全处于 Y 内,那么腐蚀完毕的元件表面图 像此点数值时为 1,反之是 0。
腐蚀反处理即为膨胀,主要实现目标范围边界对 外扩张。 此举能够去除目标范围内一部分颗粒噪声, 填补目标范围空白。 高精密光学元件表面图像内 Y 经 R 膨胀处理后变成 C:

如果 R 的原点移动至点(x,y),R 内至少存在一 个像素值是 1 的点,那么膨胀处理后 C 中此点是 1,反 之是 0 [15-17] 。
膨胀会扩大目标区域,腐蚀会缩小目标区域。 为 平衡这两种效果,数学形态学提出开运算和闭运算。 开运算能够通过结构元素将图像先后进行腐蚀、膨胀 运算:

闭运算将高精密光学元件表面图像进行膨胀后, 再进行腐蚀运算:

采用开运算和闭运算是形态学操作处理光学元 件表面疵病图像,可以有效地改善图像质量,提高疵 病检测的准确性,并为后续的疵病区域定位和评价提 供有力的支持[18] 。
2. 3 高精密光学元件表面疵病特征提取
提取去噪后元件表面图像 G′的特征集合 O,设定 G′中疵病几何面积为 A,疵病外包络矩形面积是 Aj = Zmax ×Vmax,Zmax、Vmax 分别代表疵病周长 Z 最大值、长 度 V 最大值。 设定提取的高精密光学元件表面疵病 特征集合 O 中包含的特征类型如下:
(1)矩形度 L,图像形状和矩形之间偏离状态,具体为

其中,w 代表边界链码。
2. 4 基于人工智能的元件表面疵病识别模型
将提取的疵病特征样本,输入基于人工智能的元 件表面疵病识别模型,进行元件表面疵病识别。 支持 向量机(Support Vector Machine, SVM)属于常用人工 智能技术之一,主要用于数据分类问题,也可以用于 回归和异常检测等问题。 利用此技术构建元件表面 疵病识别模型,为了将全部高精密光学元件表面疵病 特征准确分类,为构建最优超平面 f(O),设定下式优 化问题:

其中,ω 、c 依次代表最优超平面 f(O)的法向量、阈值; βj 代表元件表面疵病类型。
针对线性不可分的问题,使用松弛变量 εj,目标 函数与约束条件变成:

为保证高精度光学元件表面疵病类型分类效果, 使用 RBF 核函数 h(Oj,Oi)建立元件表面疵病识别模 型。

其中,Oj、Oi 依次代表第 j 个、第 i 个疵病特征样本;λ 代表核参数惩罚因数[19] 。
支持向量机的 λ 以及 RBF 核函数的核参数 k 会 影响疵病类型分类效果,为此,使用鲸鱼优化算法寻 优设定 支 持 向 量 参 数 { λ, k }。 对 于 支 持 向 量 机 (SVM),选择合适的参数对于模型的性能至关重要。 鲸鱼优化算法可以有效地在参数空间中搜索最优解,提高元件表面疵病识别的性能。 WOA 通过模拟座头 鲸的捕食行为,来优化支持向量参数{ λ,k} 搜索过 程,以找到支持向量参数{λ,k}优化问题的最佳解决 方案。 寻优过程中,鲸鱼个体(即支持向量参数{ λ, k}组合)位置更新结果是:

其中,σ、μ 代表系数向量;P ∗ (t)代表 t 次迭代支持向 量参数{λ,k}组合最优解所在位置。
座头鲸在捕杀猎物的初始阶段,将选择环绕模 式、螺旋模式运行,此时鲸鱼位置更新方法是:

其中,μ′、ψ 依次代表鲸鱼与猎物的距离、随机数。
实际上,头鲸进入探索阶段时,主要结合同伴位 置随机寻找猎物。 所以,引入比 1 大、比-1 小的随机 值,控制搜索代理 Ps( t) (虚拟实体,用于在搜索空间 中寻找最佳解决方案)与参考鲸鱼的距离拉大。 和开 发阶段的差异在于,探索阶段结合随机选择的搜索代 理进行寻优。 此时位置更新结果是:

鲸鱼优化算法优化支持向量参数的步骤如下:
(1)设置鱼群的初始位置,位置代表 SVM 参数的 潜在解。
(2)计算每个鲸鱼个体(即支持向量参数{λ,k} 组合)的适应度值。
(3)更新鲸鱼个体(即支持向量参数{λ,k}组合) 的位置,寻找更好的 SVM 参数组合,通过位置更新公 式调整鲸鱼个体的位置。
(4)对更新后的鲸鱼个体(即支持向量参数{λ, k}组合)重新计算适应度值,并更新最优个体和鱼群 最优解。
(5)重复上述步骤,当迭代次数为最大值,或适应 度满足理想阈值,结束寻优。 鲸鱼优化算法将输出最优的 SVM 参数组合,这 些参数将用于构建 SVM 的最优超平面,实现疵病类 型的高效分类。
3 结果与分析
为测试本方法在高精密光学元件表面疵病识别 问题中使用效果,将本方法使用于图 2 所示的实验环 境中,此实验环境主要采用计算机、高精密光学元件 表面采集装置即可完成搭建。 表 1 是高精密光学元 件表面采集装置使用的 CCD 相机性能参数信息。

采集一定数量的高精密光学元件表面图像作为 实验样本,它们包含不同类型的疵病。 采用本方法进 行高精密光学元件表面疵病识别实验。

3. 1 高精密光学元件表面疵病识别性能测试与分析
考虑光照等条件会影响高精密光学元件表面图 像质量,形态学去噪方法前后的高精密光学元件表面 图像如图 3、图 4 所示。 对比图 3 与图 4 可以看出,原 始高精密光学元件表面图像成像质量不佳,图像特征 细节不明显,主要表现为图像整体亮度较低,导致某 些细节信息被掩盖,尤其是那些与表面疵病相关的微 小变化,可能难以被捕捉到。 采用形态学去噪方法 后,图像质量得到显著提升,噪声被有效地抑制,使得 图像更加清晰。 可以观察到更加明显的图像特征细 节,尤其是与表面疵病相关的微小变化现在变得更加 突出。


表 2 为几种高精密光学元件表面疵病的特征信 息,选择 R-CNN 网络模型和本方法进行对比实验,两 种方法的识别正确率如图 5 所示。 分析图 5 可知,对 于麻点、气泡、划痕、斑点、破边几种元件表面疵病,本 方法的识别正确率超过 95%,而且对比方法的识别正 确率低于 93%,证明本方法用于高精密光学元件表面 疵病识别的优越性。

高精密光学元件表面疵病识别实时性十分关键, 因此,统计两种方法的精密光学元件表面疵病识别时 间,结果如图 6 所示。 从图 6 可知,本方法的精密光 学元件表面疵病识别时间控制在 8 s 以内,要少于对 比方法的精密光学元件表面疵病识别时间,改善了精 密光学元件表面疵病识别效率。

4 结论
研究了基于人工智能的高精密光学元件表面疵 病识别方法,此方法主要分为高精密光学元件表面图 像采集、图像去噪、特征提取、疵病分类几种核心步 骤。 实验结果显示,采用本方法能够准确识别高精密 光学元件表面的多种疵病,识别结果与给定样本数量 相同,证明该方法在实际应用中具有高度准确性。 该 方法对于提高光学元件的表面质量管控水平具有重 要意义,有助于提升产品的整体性能和可靠性。 在制 造业转型升级和智能化发展的背景下,该方法具有广 阔的应用前景和市场潜力。
